
飞行器设计与优化
▪全速域、全空域高超声速飞行器设计
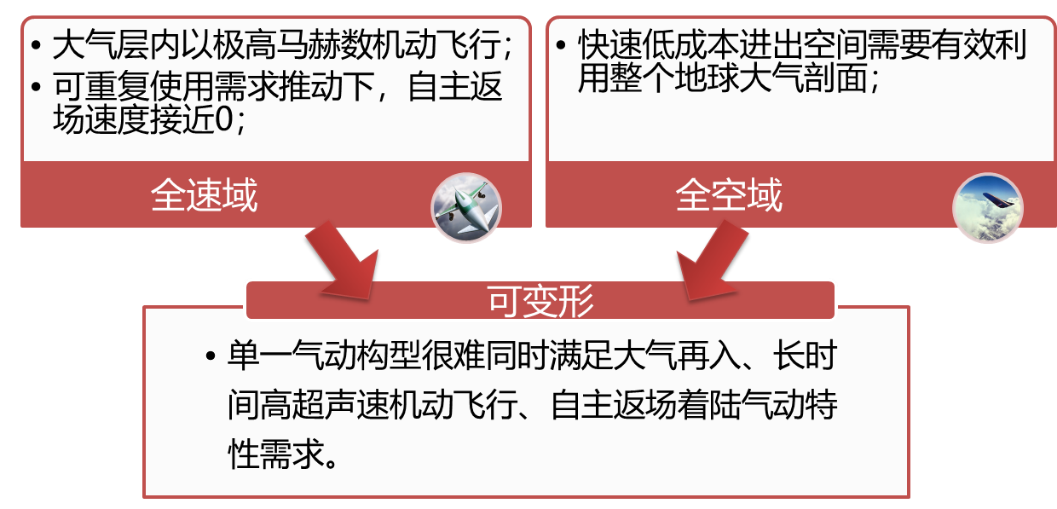
在高超声速飞行器的实际应用过程中,需要充分考虑气动力热约束、高装填率约束、末制导约束等诸多约束问题,这些约束将在很大程度上影响飞行器端头、前缘、体身、透波罩等典型部位的外形,进而决定飞行器的外形布局。探索了适合工程应用的面对称高升阻比外形,尤其是高升阻比和较高装填率的升力体构型。同时针对未来临近空间高超声速飞行器面临着全速域、全空域的应用需求,突破现有知识与技术边界,由单一向着大尺度随变构型方向发展气动构型设计技术。

▪高超声速飞行器实用化气动布局优化
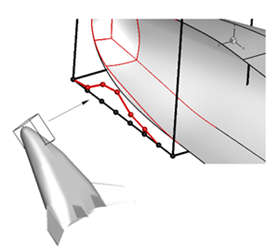
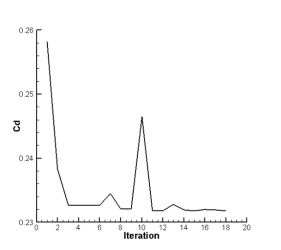
初步发展了一套求解三维全NS方程的可压缩流求解软件。该套软件已在多个工程项目中得到了应用和验证。探索了原始自由变形法(FFD)的特点并进行了高超声速飞行器的参数化建模工作。图6为基于自由变形法的两种简化的类升力体及FFD自由变形控制体示意图。参数化后的飞行器几何外形数据可以方便地传递给网格变形程序用于新的计算网格生成。基于参数化建模和数值计算的基础,采用收敛速度快、鲁棒性好的梯度优化算法,进行了翼型、喷管和钝锥等外形的优化设计,取得了良好的效果。
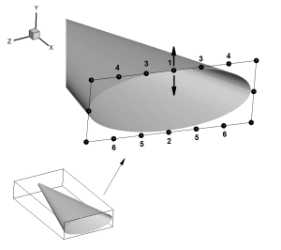
自由变形方法
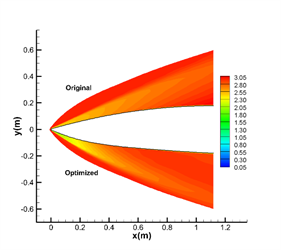
高超钝锥优化
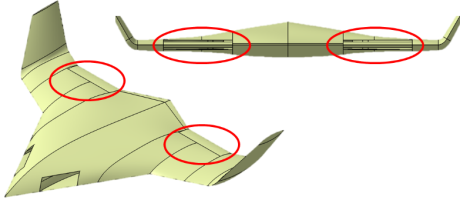
▪飞翼布局飞行平台开发
针对飞翼布局飞行器在气动、结构、隐身等方面的优势,开发靶机、目标机、察打一体等不同需求的飞行平台。

飞翼无人机

飞翼无人机拓展功能
▪验证机飞行试验与测试
对自研多款无人飞行器开展过试飞工作,包含验证机演示飞行、无人机飞行测量、特种空投飞行试验、固定翼舵机编队等科目。

空投飞行试验


飞翼布局无人飞行平台


双机编队
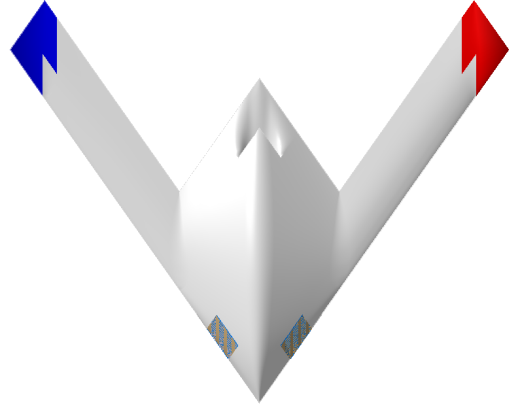
▪无舵面喷流控制飞行器研究
为了进一步提升飞翼布局飞行器的隐身和机动性,同时针对现有射流控制方案所面对的持续时间短、控制力矩小、响应速度慢等问题,将推进系统和飞行控制系统相结合,提出基于机翼展向分布喷流的飞行姿态控制方案。通过调节发动机喷流的方向和流量,产生推力的同时提供俯仰、滚转和偏航的多自由度控制力矩。该射流飞行控制方案,具备持续时间长、喷流引射效果显著、姿态控制力矩大以及整机系统更为简化的优势。

喷流控制飞行器